1. Библиотека «Роторная механика 1D»
Библиотека «Роторная механика 1D» предназначена для моделирования механических систем с одной вращательной степенью свободы. Компоненты библиотеки позволяют описывать инерционные, упругие, вязкие и контактные взаимодействия, внешние воздействия, начальные условия, измерительные устройства и преобразователи координат для задач вращательного движения.
Библиотека применяется для моделирования:
- вращающихся валов и роторов;
- приводов вращательного движения;
- редукторов и трансмиссий;
- колебательных вращательных систем;
- динамики одномерных вращательных объектов;
- задач кинематики и динамики вращательного движения.
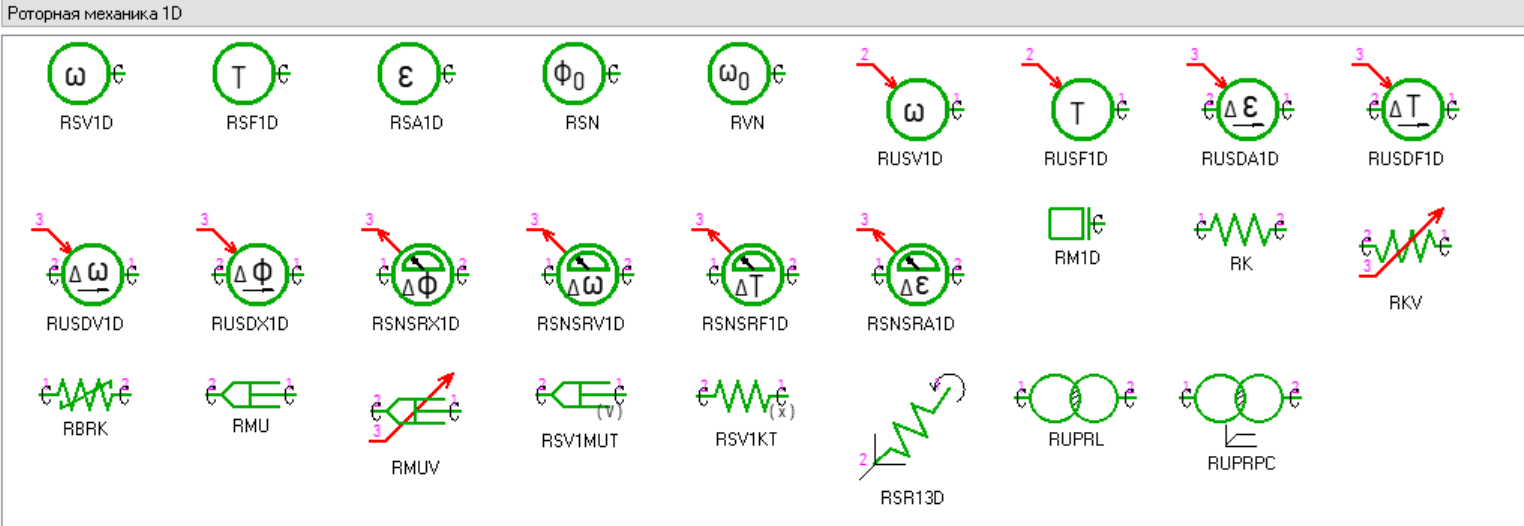
Рисунок 1 — Состав библиотеки «Роторная механика 1D».
2. Общие сведения о портах
2.1. Сигнальный порт DOF1
Сигнальный порт предназначен для передачи одномерных вращательных сигналов.
С портом связаны следующие внутренние переменные:
| Переменная | Описание |
|---|---|
| V | Значение сигнала |
| X | Интеграл сигнала |
| A | Производная сигнала |
Сигнальный порт используется для передачи угловой скорости, углового ускорения, угла поворота, крутящего момента и других одномерных сигналов между компонентами модели.
2.2. Порт роторной механики DOF1
Порт роторной механики предназначен для соединения компонентов вращательной механики.
С портом связаны следующие физические величины:
| Переменная | Описание |
|---|---|
| ω | Угловая скорость |
| T | Крутящий момент |
| ε | Угловое ускорение |
| φ | Угловое перемещение |
Угловая скорость на порте является физическим потенциалом ближайшего узла модели.
Крутящий момент на порте является потоковой характеристикой между соединяемыми узлами схемы.
Угловое ускорение определяется как производная угловой скорости.
Угловое перемещение определяется как интеграл угловой скорости.
Таким образом, каждый порт роторной механики содержит полный набор кинематических и силовых переменных, необходимых для описания вращательного движения.
3. Компоненты библиотеки
Компоненты библиотеки «Роторная механика 1D» являются вращательными аналогами компонентов библиотеки «Линейная механика 1D».
В отличие от линейной механики, где степень свободы описывается линейным перемещением, скоростью, ускорением и силой, компоненты роторной механики работают с вращательной степенью свободы, характеризуемой следующими величинами:
| Линейная механика | Роторная механика |
|---|---|
| Перемещение X | Угол поворота φ |
| Скорость V | Угловая скорость ω |
| Ускорение A | Угловое ускорение ε |
| Сила F | Крутящий момент T |
| Масса m | Момент инерции J |
Физические модели компонентов полностью соответствуют аналогичным элементам библиотеки «Линейная механика 1D», однако все расчеты выполняются для вращательного движения.
3.1. Источники и начальные условия
RSV1D
Источник постоянной угловой скорости
Рисунок — Компонент RSV1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания и поддержания постоянной угловой скорости вращения механического узла.
Обозначение
Компонент представляет собой источник угловой скорости и является вращательным аналогом компонента SV1D. Источник формирует заданную угловую скорость и передает ее в механическую систему через вращательную степень свободы.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| V | base.real | Значение угловой скорости, рад/с | 1.0 |
| Mu | base.real | Внутренняя вязкость источника, Н·с/рад | 1·10⁻⁶ |
Физическая модель
Компонент реализован как источник заданной угловой скорости с внутренним вязким сопротивлением.
Момент, создаваемый источником, определяется выражением:
где:
- M — момент, прикладываемый к механическому порту;
- V — заданная угловая скорость;
- \omega — текущая угловая скорость порта;
- \mu — внутренняя вязкость источника.
Описание
Компонент поддерживает заданную угловую скорость вращения механического узла, автоматически создавая необходимый момент для компенсации внешних воздействий. В отличие от идеального кинематического задания скорости, модель использует малую внутреннюю вязкость, что обеспечивает устойчивость численного решения.
Параметр Mu определяет жесткость поддержания заданной скорости. Чем меньше его значение, тем точнее поддерживается скорость и тем ближе поведение источника к идеальному.
RSF1D
Источник постоянного крутящего момента

Рисунок — Компонент RSF1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания постоянного крутящего момента в одномерной вращательной механической системе.
Обозначение
Компонент является вращательным аналогом элемента SF1D и представляет собой идеальный источник момента. Источник прикладывает к подключенному механическому порту постоянный крутящий момент независимо от текущего состояния системы.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| FC | base.real | Значение момента, Н·м | 1.0 |
Физическая модель
Источник создает постоянный крутящий момент:
M=const
где:
- M — момент, прикладываемый к механическому порту.
Значение момента определяется параметрами компонента и не зависит от текущего состояния системы.
Источник является идеальным и поддерживает постоянное значение момента независимо от:
- угла поворота;
- угловой скорости;
- углового ускорения.
Математическая модель записывается в виде:
M(t)=M_0
где:
- M_0 — заданное постоянное значение момента.
Динамика вращения
При подключении к валу с моментом инерции JJJ движение описывается уравнением
J\dot{\omega}=M_0
где:
- J — момент инерции;
- \omega — угловая скорость.
При отсутствии сопротивлений и внешних нагрузок угловая скорость изменяется по закону
\omega(t) = \omega_0 + \frac{M}{J_0}\,t
где:
- \omega_0 — начальная угловая скорость.
Таким образом, постоянный момент вызывает постоянное угловое ускорение вращающегося тела.
Описание
Компонент используется для моделирования двигателей, приводов и других устройств, создающих постоянное вращающее воздействие на механическую систему. Элемент задает силовое воздействие, а возникающие скорость и угол поворота определяются динамикой подключенной механической системы.
RSA1D
Источник постоянного углового ускорения

Рисунок — Компонент RSA1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания постоянного углового ускорения в одномерной вращательной механической системе.
Обозначение
Компонент является вращательным аналогом элемента SA1D и представляет собой источник углового ускорения. Элемент формирует управляющее механическое воздействие, обеспечивающее движение подключенного вращательного узла с заданным ускорением.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| acceleration | base.real | Задаваемое угловое ускорение, рад/с² | 1.0 |
| M | base.real | Коэффициент пропорциональности между отклонением ускорения и создаваемым моментом, кг·м² | 1e6 |
Физическая модель
Компонент задает требуемое угловое ускорение
\varepsilon = \varepsilon_0
где:
- \varepsilon_0 — заданное угловое ускорение.
В отличие от идеального кинематического задания, источник реализован через создание корректирующего момента, пропорционального разности между требуемым и фактическим ускорением:
M_{src}=J_{src}(\varepsilon_0-\varepsilon)
где:
- M_{src} — момент, создаваемый источником;
- \varepsilon_0 — заданное угловое ускорение;
- \varepsilon — фактическое угловое ускорение узла;
- J_{src} — коэффициент пропорциональности, эквивалентный большой виртуальной инерции.
При достаточно большом значении коэффициента пропорциональности фактическое ускорение стремится к заданному:
\varepsilon \rightarrow \varepsilon_0
Особенности реализации
Источник не накладывает абсолютно жесткое кинематическое ограничение на систему. Вместо этого он формирует момент, который стремится обеспечить требуемое ускорение.
Такой подход:
- улучшает численную устойчивость модели;
- снижает вероятность появления жестких ограничений;
- позволяет корректно взаимодействовать с инерционными элементами системы;
- обеспечивает приближенное выполнение заданного ускорения даже в сложных динамических схемах.
Описание
Компонент используется для моделирования приводов и исполнительных механизмов, работа которых описывается заданным законом изменения угловой скорости. Элемент формирует момент, необходимый для достижения требуемого ускорения вращательного узла, при этом динамика движения определяется совместно характеристиками источника и параметрами подключенной механической системы.
RSN
Начальное угловое положение

Рисунок — Компонент RSN в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания начального углового положения вращательной степени свободы.
Обозначение
Компонент является вращательным аналогом элемента SN и используется для задания начального угла поворота одномерного вращательного механического узла.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| S0 | base.real | Начальное угловое смещение, рад | 1.0 |
Физическая модель
Компонент задает начальное значение угла поворота вращательной степени свободы:
\varphi(0)=\varphi_0
где:
- \varphi(0) — угол поворота в начальный момент времени;
- \varphi_0 — заданное начальное угловое положение.
На этапе инициализации расчета координата узла устанавливается равной заданному значению:
\varphi=\varphi_0
После завершения инициализации компонент не оказывает влияния на дальнейшее движение системы и не создает механического воздействия.
Особенности реализации
Компонент используется исключительно для задания начальных условий расчета.
После начала интегрирования модели:
M(t)=0
где:
- M(t) — момент, создаваемый компонентом.
Таким образом, элемент не является источником момента, приводом или ограничением движения.
Описание
Компонент применяется в случаях, когда необходимо задать начальный угол поворота вращающегося тела, вала, рычага или другого элемента механической системы. Указанное значение используется только при формировании начального состояния модели и не участвует в дальнейших вычислениях динамики.
RVN
Начальная угловая скорость
Рисунок — Компонент RVN в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания начальной угловой скорости вращательной степени свободы.
Обозначение
Компонент является вращательным аналогом элемента VN и используется для формирования начального условия по угловой скорости одномерного вращательного механического узла.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| VN | base.real | Начальная скорость вращения, рад/с | 1.0 |
Физическая модель
Компонент задает начальное значение угловой скорости вращательной степени свободы:
\omega(0)=\omega_0
где:
- \omega(0) — угловая скорость в начальный момент времени;
- \omega_0 — заданная начальная угловая скорость.
На этапе инициализации расчета вращательному узлу присваивается указанное значение:
\omega=\omega_0
После завершения инициализации компонент не оказывает влияния на дальнейшее движение системы.
Особенности реализации
Компонент используется исключительно для задания начальных условий расчета.
После начала моделирования элемент не создает механического воздействия:
M(t)=0
где:
- M(t) — момент, создаваемый компонентом.
Дальнейшее изменение угловой скорости определяется только динамикой механической системы, действующими моментами, инерционными свойствами и связями между элементами модели.
Описание
Компонент применяется для задания предварительного вращения механической системы перед началом расчета. Используется при моделировании валов, роторов, маховиков, приводов и других вращающихся объектов, когда необходимо начать расчет с ненулевой угловой скорости.
RUSV1D
Управляемый источник угловой скорости
Рисунок — Компонент RUSV1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания угловой скорости вращательного механического узла по внешнему управляющему сигналу.
Обозначение
Компонент является вращательным аналогом элемента USV1D и представляет собой управляемый источник угловой скорости. Требуемая скорость вращения определяется значением входного сигнала и параметрами настройки компонента.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
| Signal | DOF1 | Входной управляющий сигнал |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| Vk | base.real | Коэффициент пропорциональности сигнала, рад/с | 1.0 |
| C | base.real | Постоянная составляющая скорости вращения, рад/с | 0.0 |
| Mu | base.real | Внутренняя вязкость источника, Н·с·м/радиан | 1.0e−9 |
Физическая модель
Требуемая угловая скорость определяется линейной зависимостью от управляющего сигнала:
\omega_0 = K u + C
где:
- \omega_0 — требуемая угловая скорость;
- u — значение управляющего сигнала;
- K — коэффициент масштабирования сигнала;
- C — постоянная составляющая скорости.
Источник стремится поддерживать фактическую угловую скорость, равной заданной:
\omega \rightarrow \omega_0
Для этого компонент создает корректирующий момент, пропорциональный отклонению фактической скорости от требуемой:
M=\frac{\omega_0-\omega}{\mu}
или
M=\frac{Ku+C-\omega}{\mu}
где:
- M — момент, создаваемый источником;
- \omega — фактическая угловая скорость механического порта;
- \mu — внутренняя вязкость источника.
При малом значении внутренней вязкости фактическая скорость практически совпадает с заданной:
\omega \approx Ku + C
Описание
Компонент используется для моделирования управляемых приводов вращения, скорость которых определяется внешним управляющим воздействием. Изменение сигнала на входном порту приводит к изменению требуемой угловой скорости, а компонент автоматически формирует момент, необходимый для достижения нового режима работы.
RUSF1D
Управляемый источник крутящего момента
Рисунок — Компонент RUSF1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для формирования крутящего момента на вращательном механическом порту в зависимости от значения управляющего сигнала.
Обозначение
Компонент является вращательным аналогом элемента USF1D и представляет собой идеальный управляемый источник момента. Величина создаваемого момента определяется входным сигналом и параметрами настройки компонента.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Node | base.DOF1 | 1D механический вращательный порт |
| Signal | DOF1 | Входной управляющий сигнал |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| Fk | base.real | Коэффициент пропорциональности сигнала, Н·м | 1.0 |
| F0 | base.real | Постоянное значение момента, Н·м | 0.0 |
Физическая модель
Создаваемый источником момент определяется линейной зависимостью от управляющего сигнала:
M = Ku + M_0
где:
- M — момент, создаваемый источником;
- u — значение управляющего сигнала;
- K — коэффициент передачи сигнала;
- $M_0$ — постоянная составляющая момента.
При нулевом управляющем сигнале компонент формирует постоянный момент, определяемый параметрами модели.
Источник является идеальным и не зависит от текущего состояния механической системы:
- угла поворота;
- угловой скорости;
- углового ускорения;
- инерционных характеристик подключенных элементов.
Динамика системы
Создаваемый момент непосредственно участвует в уравнении движения вращательной системы:
J\dot{\omega}=\sum
где:
- J — момент инерции;
- \omega — угловая скорость;
- \sum M — сумма моментов, действующих на систему.
Момент, создаваемый компонентом, определяется выражением
M = Ku + M_0
и входит в общий баланс моментов наравне с другими механическими воздействиями.
Описание
Компонент используется для моделирования управляемых приводов, исполнительных механизмов и систем автоматического управления, в которых управляющий сигнал непосредственно определяет величину прикладываемого крутящего момента. Изменение сигнала приводит к пропорциональному изменению момента без дополнительных динамических или кинематических ограничений.
RUSDA1D
Управляемый источник разности угловых ускорений
Рисунок — Компонент RUSDA1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания разности угловых ускорений между двумя вращательными механическими портами по внешнему управляющему сигналу.
Обозначение
Компонент представляет собой управляемый источник относительного углового ускорения. Требуемая разность угловых ускорений между портами определяется входным сигналом и параметрами настройки модели.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Port1 | base.DOF1 | 1D механический вращательный порт 1 |
| Port2 | base.DOF1 | 1D механический вращательный порт 2 |
| Signal | DOF1 | Входной управляющий сигнал |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| M | base.real | Коэффициент пропорциональности сигнала, рад/с² | 1e6 |
| C | base.real | Постоянное значение углового ускорения, рад/с² | 0.0 |
Физическая модель
Требуемая разность угловых ускорений определяется линейной функцией управляющего сигнала:
\Delta\varepsilon_0 = Ku + C
где:
- \Delta\varepsilon_0 — требуемая разность угловых ускорений;
- u — значение управляющего сигнала;
- K — коэффициент передачи сигнала;
- C — постоянная составляющая.
Компонент стремится обеспечить выполнение условия
\varepsilon_1-\varepsilon_2=\Delta\varepsilon_0
где:
- \varepsilon_1 — угловое ускорение первого порта;
- \varepsilon_2 — угловое ускорение второго порта.
Для реализации данного условия между портами создается момент взаимодействия, пропорциональный отклонению фактической разности ускорений от требуемой:
M = J_v \left(\Delta \varepsilon_0 - (\varepsilon_1 - \varepsilon_2)\right)
где:
- M — момент взаимодействия между портами;
- $J_v$ — эквивалентный коэффициент инерции элемента.
Согласно закону сохранения момента, на порты воздействуют равные по величине и противоположные по знаку моменты:
M_1=M
M2=−M
При большом значении коэффициента инерции фактическая разность ускорений становится близкой к требуемой:
\varepsilon_1-\varepsilon_2 \approx Ku+C
Особенности реализации
Компонент не накладывает жесткое кинематическое ограничение на движение. Требуемая разность угловых ускорений обеспечивается через создание внутренних моментов взаимодействия между портами.
Такой подход:
- повышает устойчивость численного решения;
- исключает появление жестких кинематических связей;
- позволяет корректно взаимодействовать с инерционными элементами системы;
- обеспечивает плавное формирование требуемого режима движения.
Описание
Компонент используется для моделирования управляемых вращательных связей, в которых необходимо поддерживать заданную разность угловых ускорений между двумя механическими элементами. Значение этой разности определяется внешним управляющим сигналом и может изменяться в процессе моделирования.
RUSDF1D
Управляемый источник разности моментов
Рисунок — Компонент RUSDF1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для создания моментного воздействия между двумя вращательными механическими портами по внешнему управляющему сигналу.
Обозначение
Компонент является вращательным аналогом элемента USDF1D и представляет собой управляемый источник относительного крутящего момента. Величина создаваемого момента определяется значением управляющего сигнала и параметрами модели.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Port1 | base.DOF1 | 1D механический вращательный порт 1 |
| Port2 | base.DOF1 | 1D механический вращательный порт 2 |
| Signal | DOF1 | Входной управляющий сигнал |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| F | base.real | Коэффициент пропорциональности сигнала, Н·м | 1.0 |
| C | base.real | Постоянное значение момента, Н·м | 0.0 |
Физическая модель
Создаваемый момент определяется линейной зависимостью от управляющего сигнала:
M = Ku + M_0
где:
- M — момент, создаваемый источником;
- u — значение управляющего сигнала;
- K — коэффициент передачи сигнала;
- $M_0$ — постоянная составляющая момента.
Компонент прикладывает к двум вращательным портам моменты одинаковой величины и противоположного направления:
M_1 = M
M_2=−M
Таким образом, между портами создается управляемое моментное воздействие, при этом суммарный внешний момент системы остается равным нулю:
M_1 + M_2 = 0
Описание
Компонент используется для моделирования управляемых вращательных связей, муфт, приводов и исполнительных механизмов, в которых требуется передавать между двумя вращательными элементами заданный момент, определяемый внешним управляющим сигналом.
Источник является идеальным и не зависит от:
- углов поворота портов;
- угловых скоростей;
- угловых ускорений;
- моментов инерции подключенных элементов.
Величина передаваемого момента определяется только управляющим сигналом и параметрами модели.
RUSDV1D
Управляемый источник разности скоростей вращения
Рисунок — Компонент RUSDV1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания разности угловых скоростей между двумя вращательными механическими портами по внешнему управляющему сигналу.
Обозначение
Компонент является вращательным аналогом элемента USDV1D и представляет собой управляемый источник относительной угловой скорости. Требуемая разность скоростей формируется по управляющему сигналу и поддерживается за счет создаваемого между портами момента.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Port1 | base.DOF1 | 1D механический вращательный порт 1 |
| Port2 | base.DOF1 | 1D механический вращательный порт 2 |
| Signal | DOF1 | Входной управляющий сигнал |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| K | base.real | Коэффициент пропорциональности сигнала, рад/с | 1.0 |
| C | base.real | Постоянное значение скорости вращения, рад/с | 0.0 |
| Mu | base.real | Внутренняя вязкость источника, Н·с·м/радиан | 1.0·10⁻⁶ |
Физическая модель
Требуемая разность угловых скоростей определяется линейной функцией управляющего сигнала:
\Delta\omega_0 = Ku + C
где:
- \Delta \omega_0 — заданная разность угловых скоростей;
- u — значение управляющего сигнала;
- K — коэффициент передачи сигнала;
- C — постоянная составляющая.
Модель стремится обеспечить выполнение условия:
\omega_1 - \omega_2 = \Delta\omega_0
или
\omega_1 - \omega_2 = Ku + C
Источник реализован через внутреннюю вязкость, поэтому при отклонении фактической разности скоростей от заданной между портами создается момент:
или
где:
- M — момент взаимодействия между портами;
- \omega_1, \omega_2 — угловые скорости портов;
- \mu — внутренняя вязкость источника.
К портам прикладываются равные по величине и противоположные по направлению моменты:
M_1=M
M_2=-M
При малом значении внутренней вязкости фактическая разность скоростей становится близкой к заданной:
\omega_1-\omega_2 \approx Ku+C
Описание
Компонент используется для моделирования управляемых вращательных передач, синхронизаторов, приводов и других механизмов, в которых необходимо поддерживать заданную разность угловых скоростей между двумя вращающимися элементами.
Управляющий сигнал определяет требуемую разность скоростей, а модель автоматически формирует моментное воздействие, необходимое для выполнения этого условия.
RUSDX1D
Управляемый источник разности углового перемещения
Рисунок — Компонент RUSDX1D в библиотеке вращательной механики 1D.
Назначение
Компонент предназначен для задания разности угловых перемещений между двумя вращательными механическими портами по внешнему управляющему сигналу.
Обозначение
Компонент является вращательным аналогом элемента USDX1D и представляет собой управляемый источник относительного углового перемещения. Требуемая разность углов формируется по управляющему сигналу и поддерживается за счет моментного воздействия между портами.
Порты
| Обозначение порта | Тип | Наименование |
|---|---|---|
| Port1 | base.DOF1 | 1D механический вращательный порт 1 |
| Port2 | base.DOF1 | 1D механический вращательный порт 2 |
| Signal | DOF1 | Входной управляющий сигнал |
Пользовательские параметры
| Параметр | Тип | Описание | Значение по умолчанию |
|---|---|---|---|
| K | base.real | Коэффициент пропорциональности сигнала, рад | 1.0 |
| C | base.real | Постоянное значение углового смещения, рад | 0.0 |
Физическая модель
Требуемая разность угловых перемещений определяется линейной зависимостью:
\Delta \varphi_0 = Ku + C
где:
- \Delta \varphi_0 — заданная разность угловых перемещений;
- u — значение управляющего сигнала;
- K — коэффициент передачи сигнала;
- C — постоянная составляющая углового смещения.
Модель стремится обеспечить выполнение условия:
\varphi_1 - \varphi_2 = \Delta \varphi_0
или
\varphi_1 - \varphi_2 = Ku + C
Для поддержания заданной разности углов между портами элемент создает пару противоположно направленных моментов. Величина момента пропорциональна отклонению фактической разности углов от заданной:
M \sim K_u + C - (\varphi_1 - \varphi_2)
где:
- M — момент взаимодействия между портами;
- \varphi_1 , \varphi_2 — угловые перемещения портов.
К портам прикладываются равные по величине и противоположные по направлению моменты:
M_1 = M
M_2 = -M
В результате фактическая разность угловых перемещений стремится к заданному значению:
\varphi_1 - \varphi_2 \approx Ku + C
Описание
Компонент используется для задания управляемого относительного углового положения между двумя вращающимися элементами механической системы. Управляющий сигнал определяет требуемую разность углов, а элемент автоматически формирует моментное воздействие, необходимое для поддержания этого положения.
Элемент может применяться при моделировании следящих систем, механизмов синхронизации, позиционирующих приводов и других устройств, в которых необходимо поддерживать заданное относительное угловое смещение между валами.